Virtual see-through

Virtual see-through can be implemented with an Head Mounted Display (HMD) and a camera. The video stream is directly displayed on the screen and the transparency is emulated. It can be used to zoom or superpose information in Augmented Reality applications.
The first goal of the project is to characterize the user perception for different video streams. Many parameters could be adjusted: frame rate, compression rate, color depth, and picture size. The second goal is to design a controller maximizing the user perception for a given level of quality of service.
The student must first implement the image acquisition, compression and rendering. Then, user requirements in term of quality of service (perception) will be investigated. Finally, a MISO (Inputs: compression parameters, Output: size) controller will be designed and implemented.
The project is a part of a research project called 6th sense. Its goal is to develop a wearable supervision system for industrial plants based on augmented reality.
MER : Denis Gillet
Type of project: Master
Assistants: Damien Perritaz and Christophe Salzmann
Student: Jean Mabillard
Sky-sailor : saving energy through control
 The Sky-sailor is a motorized glider aimed at flying autonomously. The energy is for instance provided by solar cells and stored in a battery and/or as potential energy (altitude gain). The final goal of the Sky-sailor project is to maximize the energetic autonomy of the glider, and possibly break the present records of flight duration.
The Sky-sailor is a motorized glider aimed at flying autonomously. The energy is for instance provided by solar cells and stored in a battery and/or as potential energy (altitude gain). The final goal of the Sky-sailor project is to maximize the energetic autonomy of the glider, and possibly break the present records of flight duration.
The energetic performance of the machine can be monitored in real-time and depends on the flight conditions (air mass movements), on the flight regime (e.g. airspeed), on the machine characteristics (i.e. the polars, position of center of gravity) and on the autopilot characteristics.
A stabilizing autopilot has been already realized for the Sky-sailor in a previous student project. A very accurate Simulink model is available to study various control strategies.
The goal of this project is to develop a control strategy that minimizes the energy consumption while fulfilling the goals assigned to the machine. This includes:
1) The development of a stabilizing controller that minimizes the energy spent for the control (i.e. control-induced drag)
2) The development of various extremum-seeking strategies that will assign optimal flight regimes based on the available measurements (airspeed, ground speed, vario, motor power, etc…)
The computational power available for the control is limited, therefore, one of the challenge of the project is to develop simple but efficient control strategies. The control strategies will be developed in simulations and implemented on the real machine for validation at the end of the project.
This project will be done in collaboration with ETHZ.
Requirements: good knowledge in control, interests in aeronautics.
Professor: Dominique Bonvin
Type of project: Semester
Assistants: Sébastien Gros and André Noth
Student: Michael Devyver
SwissCube Control Algorithm Design and Validation
 The LA is in charge of the attitude determination and control of the SwissCube. The attitude control is a challenging problem due to power and mass limitation of the actuators and sensors (max. 0.1 W and 50 g). In the first step of the project, a preliminary actuators (magnetotorquers combined with a inertia wheel) and sensors (gyroscopes, sun sensors and flux gate sensors) choice has been made. Moreover a dynamic model of the satellite has been established. The following steps will be considered in this project:
The LA is in charge of the attitude determination and control of the SwissCube. The attitude control is a challenging problem due to power and mass limitation of the actuators and sensors (max. 0.1 W and 50 g). In the first step of the project, a preliminary actuators (magnetotorquers combined with a inertia wheel) and sensors (gyroscopes, sun sensors and flux gate sensors) choice has been made. Moreover a dynamic model of the satellite has been established. The following steps will be considered in this project:
1. Validation of the dynamic model of SwissCube.
2. Comparative study of attitude control solutions.
3. Design of an attitude controller.
4. Test of the designed controller in simulation using the dynamic model of SwissCube.
For more information see the official site of EPFL SwissCube.
MER: Denis Gillet
Type of project: Master
Assistants: Philippe Müllhaupt
Student: Basile Graf
A gain-scheduling-control technique for a double-axis linear motor
 Traditionally, a gain-scheduling-control technique consists of designing several controllers for fixed operating points and interpolating between them to construct a global gain-scheduling controller. In this project, a new approach based on an interpolation between the poles, zeros and gains of the local controllers as a function of the varying parameter will be used. This gain-scheduling-control technique will be applied on a double-axis positioning system. The dynamics of this system depend on the axis positions. Non parametric models in frequency domain are available for different positions.
Traditionally, a gain-scheduling-control technique consists of designing several controllers for fixed operating points and interpolating between them to construct a global gain-scheduling controller. In this project, a new approach based on an interpolation between the poles, zeros and gains of the local controllers as a function of the varying parameter will be used. This gain-scheduling-control technique will be applied on a double-axis positioning system. The dynamics of this system depend on the axis positions. Non parametric models in frequency domain are available for different positions.
The objective will be first to design several controllers for fixed operating points using different methods (linear programming, pole placement, …). Then to construct a global gain-scheduling controller by interpolating between the local controllers.
This project covers a complete real control engineering problem which starts from identification and modeling and ends up with application of the designed controller on the real system.
This project is done in collaboration with ETEL.
References:
[1] Paijmans, B. et al, “A gain-scheduling-control technique for mechatronic systems with position-dependant dynamics”, Proceedings of the 2006 American Control Conference, Minneapolis, Minnesota, USA, June 14-16, 2006
[2] Karimi, A. et al, “Robust PID Controller Design by Linear Programming”, Proceedings of the 2006 American Control Conference, Minneapolis, Minnesota, USA, June 14-16, 2006
Professor: Roland Longchamp
Type of project: Semester
Assistants: Marc Kunze and Alireza Karimi
Student: Nicolas Rebeaud
Augmented reality on iPAQ
 The goal of this project is to develop a simple Augmented Reality (AR) application. The student has to choose a scenario to show the possibility of the AR and program the embedded system. The image from the camera must be acquired, processed and the virtual image must be superposed. The final image is finally displayed on the screen.
The goal of this project is to develop a simple Augmented Reality (AR) application. The student has to choose a scenario to show the possibility of the AR and program the embedded system. The image from the camera must be acquired, processed and the virtual image must be superposed. The final image is finally displayed on the screen.
An example of AR application deployed on iPAQ is the Invisible Train (picture on the right). A free software library is available for AR development: ARToolKit .
The project is a part of a research project called 6th sense. Its goal is to develop a wearable supervision system for industrial plants based on augmented reality.
Software: 80%
Theory: 20%
MER : Denis Gillet
Type of project: Semester
Assistants: Damien Perritaz and Christophe Salzmann
Student: Gregoire Salamin
Monitoring and piloting of a spider crane
 So as to improve container transfer rates, a new highly efficient crane design named “SpiderCrane” and its controller have been developed at the Automatic Control Laboratory. Both monitoring and piloting are crucial in attaining port efficiency. These considerations can be validated using a reduced-order model of Spidercrane recently built.
So as to improve container transfer rates, a new highly efficient crane design named “SpiderCrane” and its controller have been developed at the Automatic Control Laboratory. Both monitoring and piloting are crucial in attaining port efficiency. These considerations can be validated using a reduced-order model of Spidercrane recently built.
The project has two objectives:
(i) Develop an augmented reality environment allowing monitoring and direct interaction with the crane.
(ii) Endeavour a piloting aid that uses a joystick and dedicated software.
The student should assess the amount of gain in efficiency that such an approach can bring.
Professor: Dominique Bonvin
Type of project: Semester
Assistants: Davide Buccieri and Christophe Salzmann
Student: Marc Clapera
Friction modeling of a linear motor
 Friction is present in all mechatronic devices and for the majority of these its presence causes a reduction in the achievable performance of the device. Phenomena that arise from the presence of friction in systems include tracking errors, limit cycles and stick-slip motion. The modeling, identification and compensation of friction are, therefore, of great interest.
Friction is present in all mechatronic devices and for the majority of these its presence causes a reduction in the achievable performance of the device. Phenomena that arise from the presence of friction in systems include tracking errors, limit cycles and stick-slip motion. The modeling, identification and compensation of friction are, therefore, of great interest.
As a manufacturer of high precision linear motors the Swiss company ETEL is naturally interested in this problem. Projects, previously carried out at the Laboratoire d’Automatique in collaboration with ETEL, to identify the parameters of the popular LuGre (Lund-Grenoble) friction model for a linear motor have been very successful in finding the static model parameters [1] . Problems, however, have been encountered in identifying the dynamic parameters and, thus far, compensation has not been attempted.
This project proposes investigating better ways of identifying the dynamic parameters of the LuGre friction model. Once a satisfactory identification of the parameters has been done, different friction compensation schemes will be implemented on the linear motor system to compare their performances.
The project is proposed in collaboration with the Swiss company, ETEL.
Professor: Roland Longchamp
Type of project: Semester
Assistants: Mark Butcher and Alireza Karimi
Student: Charlie Darricau
Double rotor wind turbine control and optimization
 An innovative double-rotor wind turbine is proposed by Eotheme Sarl. Two counter-rotating vans are connected to an electrical generator by a power transmission device, which allows the transmission of both mechanical energy to the generator. A mechanical prototype has been developed by the HEIG VD. The overall control methodology should optimize the efficiency of this wind power generation system.
An innovative double-rotor wind turbine is proposed by Eotheme Sarl. Two counter-rotating vans are connected to an electrical generator by a power transmission device, which allows the transmission of both mechanical energy to the generator. A mechanical prototype has been developed by the HEIG VD. The overall control methodology should optimize the efficiency of this wind power generation system.
The aim of this project is to :
-Ellaborate a dynamical model of the system.
-Identify the corresponding parameters.
-Study a control algorithm to maintain the system at a prescribed working point.
A direct implementation of the designed controller on the prototype is foreseen at the end of the project.
The project is proposed in collaboration with Eotheme Sarl .
Professor: Dominique Bonvin
Type of project: Master
Assistants: Yvan Michellod and Philippe Mullhaupt
Student: Sylvain Rudaz
Sky-sailor : exploiting thermals
The Sky-sailor is a motorized glider aimed at flying autonomously. The energy is for instance provided by solar cells and stored in a battery and/or as potential energy (altitude gain). The final goal of the Sky-sailor project is to maximize the energetic autonomy of the glider, and possibly break the present records of flight duration.
A stabilizing autopilot has been already realized for the Sky-sailor in a previous student project. A very accurate Simulink model is available to study various control strategies.
A parallel project will provide control strategies that minimize the energy consumption of the machine. While energy saving is crucial for the success of the Sky-sailor, alternative ways for gaining energy are to be considered. During warm days, a tremendous amount of energy is transferred through the air mass by thermal currents (tubes of warm raising air). Heuristic flight strategies exist to extract energy from the thermal currents (e.g. « Tighten-on-surge » / « Widen-on-surge »).
The goal of this project is to build a rough model of the thermals structure, and to develop simple and autonomous versions of the heuristic flight strategies capable of extracting energy from the air mass. This work will be done in simulations and the resulting strategy will be possibly tested on the real machine.
This project will be done in collaboration with ETHZ.
Requirements: good knowledge in control, interests in aeronautics.
Professor: Dominique Bonvin
Type of project: Semester
Assistant: Sébastien Gros and André Noth
Student: Jannick Fenner
Control and security of the Hydropter
 The Hydropter is a sailing boat using hydrofoils (lifting surfaces operating in liquids). The hydrofoils generate enough lift to carry the boat and balance the forces produced by the sails at a level of drag far inferior to those obtained with classical hulls : the boat flies on the water. The speeds reached by the hydropter exceed largely those obtained with standard sailing boats. The main drawback of this type of system is the lack of stability with respect to waves and the difficult steering.
The Hydropter is a sailing boat using hydrofoils (lifting surfaces operating in liquids). The hydrofoils generate enough lift to carry the boat and balance the forces produced by the sails at a level of drag far inferior to those obtained with classical hulls : the boat flies on the water. The speeds reached by the hydropter exceed largely those obtained with standard sailing boats. The main drawback of this type of system is the lack of stability with respect to waves and the difficult steering.
Based on a model previously obtained, the student will develop a novel control scheme with two objectives in mind :
1) Incorporate a pre-stabilizing mechanism : the actual steering is left to the pilot, but a feedback loop is included between the pilot orders and the system, so as to render the machine response stable and neutral from the pilot’s point of view.
2) Address a safe landing procedure. For landing the Hydropter, a huge amount of energy must be absorbed. Therefore, when not done properly, very high and damaging forces are applied to the structure. It is proposed to study suitable motion planning techniques (optimization + ad hod techniques) to ensure a safe and satisfactory landing.
Professor: Dominique Bonvin
Type of project: Semester
Assistants: Sébastien Gros and Philippe Mullhaupt
Student: Arthur Queval
Control of Once-Through Cooler
 Overall efficieny is one of the main parameters for profitability of power plants. Overall effiency strongly depends on the efficiency of the plant’s main components (such as the steam generator and the steam turbines) as well as the component cost.
Overall efficieny is one of the main parameters for profitability of power plants. Overall effiency strongly depends on the efficiency of the plant’s main components (such as the steam generator and the steam turbines) as well as the component cost.
For reasons of cost reduction the classical recirculation evaporators have been replaced by so-called “Once-Through” evaporators in recent plant projects. Recirculation evaporators use a pressure vessel (called drum) for the evaporation of water. The evaporation process is strictly confined to this vessel by means of recirculation. On the other hand, Once-Through evaporators perform preheating and evaporation during a single pass of water/steam through the system. Water enters the system on one side, heats up while it progresses through the system, then starts evaporating at a variable intermediate location, and finally exits as steam on the opposite side. The evaporation zone within the Once-Through cooler depends on the state of the system (pressure, temperature distribution) and is highly variable. This results in considerable stability problems that are unknown from conventional evaporators.
When using Once-Through evaporators in combined cycle plants, the steam generation is performed by the use of the hot exhaust gases from a gas turbine. The exhaust gas temperature may be subject to fast transients due to the operation concept of the gas turbine. In conjunction with the inherent stability problems mentioned above, the control of Once-Through evaporators and their adjacent components requires innovative control concepts.
The purpose of this project is the investigation of the transient behaviour of a Once-Through evaporator, and the dynamic modeling for the purposes of control. Based on the dynamic model, a control concept (possibly based on distributed actuators/sensors) shall be developed that allows for stabilization and control of the evaporator under various plant transients including start-up and load rejection.
The task breakdown is as follows:
– Development of a dynamic model of a Once-Through Cooler.
– Model Calibration and Validation based on available measurements.
– Design of an advanced control concept.
– Validation by simulation.
The project is proposed in collaboration with ALSTOM-POWER. The work will be done in Alstom, Baden, Dept. PIT6 under the supervision of Fabian Hüsser and Dr. Stephen Hepner.
Professor: Roland Longchamp
Type of project: Master
Assistant: Alireza Karimi
Student: Seyed-Hanif Tabatabaee
Toycopter control
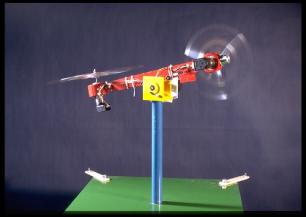 The Toycopter is a highly-coupled nonlinear system, the control of which exhibits many difficulties. The aim of this project is to apply an optimal nonlinear control strategy consisting in two parts, namely
The Toycopter is a highly-coupled nonlinear system, the control of which exhibits many difficulties. The aim of this project is to apply an optimal nonlinear control strategy consisting in two parts, namely
i) a feedforward control part computed based on a model, and
ii) closed-loop tracking of the aforementioned open-loop control.
This work will be undertaken both in Matlab and in a specific numerical optimisation package available at LA. If time is available, the control will be implemented on the available experimental setup.
Professor: Dominique Bonvin
Type of project: Master
Assistant: Sébastien Gros and Philippe Mullhaupt
Student: Gregory Reichhold
Robust PID control of a flexible joint
 In this project, the robust control of a flexible joint is considered. This system contains a main arm attached to a servomotor by two identical springs. The system parameters can be changed by adding an extra arm or changing the anchor points of the springs.
In this project, the robust control of a flexible joint is considered. This system contains a main arm attached to a servomotor by two identical springs. The system parameters can be changed by adding an extra arm or changing the anchor points of the springs.
Robust controllers are designed to stabilize and satisfy the performances for a set of models. This type of controllers can be applied to nonlinear systems linearized in different operating points, time-varying systems as well as systems with parametric uncertainty.
The objective of this project is to design a robust controller which stabilizes all possible configurations of the flexible joint and ensure a certain gain and phase margin and crossover frequency for all models. The main idea is to compare the performances of a design method developed in LA with the classical PID or RST controllers. The new method is based on open-loop shaping in the frequency domain using a set of non-parametric models. Linear programming or quadratic programming is employed to optimize the controller parameters for all models.
First of all, the model identification will be carried out for different configurations. Then, different methods will be used to design several controllers which will be compared in simulation and on the experimental set up.
Professor: Roland Longchamp
Type of project: Semester
Assistants: Gorka Galdos et Alireza Karimi
Student: Vincent Reymond
Application of iterative learning control to a linear motor
Iterative Learning Control (ILC) is a relatively new control algorithm employed to improve the tracking performance of systems carrying out repetitive tasks. The algorithm uses information from the previous repetitions to adjust the input signal to the system at the next iteration in such a way as to reduce the tracking error.
Recently a new ILC algorithm, Parameter Optimal Iterative Learning Control (POILC), has been proposed. This algorithm aims to increase the rate of convergence of the error between iterations by choosing a gain that optimally reduces the error in some norm.
The objective of the project is apply this new algorithm to a linear motor system, and to compare its performance, in terms of the error convergence rate, final tracking precision and robustness to the presence of noise, with other previously employed algorithms.
References:
D.H. Owens and K. Feng. Parameter optimization in iterative learning control. International Journal of Control, 76 (11), 1059-1069, 2003
D.H. Owens and J. Hätönen. Iterative learning control – An optimization paradigm. Annual Reviews in Control, 29, 57-70, 2005
The project is proposed in collaboration with the Swiss company, ETEL.
Professor: Roland Longchamp
Type of project: Master
Assistant: Mark Butcher et Alireza Karimi
Student : David Delcor
Collective motion stabilization and recovery strategies
The first objective of this project is to implement and compare various existing collective motion stabilizing strategies. A platoon of vehicles will be simulated on a local environment and a monitoring technique will give the essential information to reconstruct the platoon on a second environement (over the internet). The second phase of the project is to elaborate a rescue strategy in case a failure occurs in one of the vehicles (i.e. steering failure, crash etc.) based on information on the monitoring environement only.
This project is proposed in collaboration with the University of Florida and will be co-supervised by Prof. Oscar D. Crisalle .
MER : Denis Gillet
Type of project: Master
Assistant: Philippe Mullhaupt
Student: Piawat Kaewkerd
Modeling and Synthesis of a Flux-Gate Current-Loop Detection
 Precise current measurement is a technological challenging issue. Indeed, ensuring fine current discrimination (sensitivity), while simultaneously reducing measurement noise, is not an easy task. “Flux-gate” technology addresses these issues in an efficient manner.
Precise current measurement is a technological challenging issue. Indeed, ensuring fine current discrimination (sensitivity), while simultaneously reducing measurement noise, is not an easy task. “Flux-gate” technology addresses these issues in an efficient manner.
In this project, the student will develop a high frequency model and include it in an already developed model of a part of a complete current sensing scheme. This previous model was obtained during two previous semester projects and includes a low-frequency part together with the model of a second harmonic detection device. The goal is to achieve a satisfactory closed-loop model of the complete system. A set of unknown parameters will be chosen and identified using real-time measurements obtained on a prototype (this identification will be carried out in closed-loop). The subset of the most sensitive parameters will also be carefully examined. Closed-loop stability will then be studied. Special care will be taken so as to build a controller that takes both issues (sensitivity and stability) into consideration.
Professor: Roland Longchamp
Type of project: Master
Assistants: Davide Buccieri and Philippe Mullhaupt
Student: Alejandro Rujas
Odometry and path tracking applied to a wheeled robotic base
 The aim of this project is to control a robotic unit made of two motors equiped with encoders. Modeling alternatives and control strategies will be investigate by simulation and on a real prototype.
The aim of this project is to control a robotic unit made of two motors equiped with encoders. Modeling alternatives and control strategies will be investigate by simulation and on a real prototype.
As the solution could possibly be implemented on another robot (ie for the Eurobot competition), the system will be considered as a black box and standard communication protocols will be used.
MER : Denis Gillet
Type of project: Semester
Assistants: Damien Perritaz and Christophe Salzmann
Student: Simon Tinguely
Control of an Aircraft with Structural Resonance Modes
 Design of flying machines is a constrained optimization problem. In aeronautics, all design constraints result in performance losses. Hence, any method or technology that reduces or removes constraints from the design stage is valuable. Among the many design constraints, passive stability is required so that the human can safely pilot the aircraft.
Design of flying machines is a constrained optimization problem. In aeronautics, all design constraints result in performance losses. Hence, any method or technology that reduces or removes constraints from the design stage is valuable. Among the many design constraints, passive stability is required so that the human can safely pilot the aircraft.
However, control technology has broadened the design spectrum by removing the passive stability constraint. This is extensively undertaken in the design of military fighting aircrafts.
The design of a control-loop for unstable systems in the presence of unknown or changing dynamics is critical. In the frequency domain, models for aircraft dynamics are known to be accurate up to the frequency of the first resonance mode of the structure, as this mode tends to move substantially with flight conditions (mass distribution & loading).
In this project, the linearized model of a large aspect ratio aircraft will be used to study the limitations imposed on the control-loop performance when the resonance of the wings is not accurately known. The gain in performance of the close-loop system resulting from measurements of the wing flexion will be studied.
Professor: Dominique Bonvin
Type of project: Semester
Assistant: Sébastien Gros
Student: Jonathan Lugon
A linear state feedback controller for a spider crane
 To improve container transfer rates, a new highly efficient crane design named “SpiderCrane” and its controller have been developed at the Automatic Control Laboratory. A reduced-order model of Spidercrane recently built, in order to test its behavior.
To improve container transfer rates, a new highly efficient crane design named “SpiderCrane” and its controller have been developed at the Automatic Control Laboratory. A reduced-order model of Spidercrane recently built, in order to test its behavior.
This project has two objectives:
(i) Construct a dynamical model of SpiderCrane using the Lagrange formalism.
(ii) Synthesize a linear state feedback controller for SpiderCrane and compare its efficiency with the non- linear controller developed at the Automatic Control Laboratory.
Professor: Dominique Bonvin
Type of project: Semester
Assistants: Davide Buccieri
Student: Dominick Vanthienen