J061——————————————————————————-
 Gaussian Process-Based Identification and Control of Polydôme
Gaussian Process-Based Identification and Control of Polydôme
Electrical grids are undergoing a substantial change in recent years. The classical picture of consumer centres being passive agents in the network merely receiving the demanded energy from large generators is now outdated. As an example, when exploiting renewable sources, consumers may play the role of a distributed generator by injecting power into the grid. Another possible service special consumers can provide to help stabilizing the network is to dynamically adjust their demands in accordance to directives given by the grid operator. The high energy consumption of office buildings associated with their heating, ventilation and air-conditioning (HVAC) systems make them particularly suitable for such task.
This project aims at developing and testing a realistic demand response (DR) approach to HVAC control of office buildings: instead of requiring access to each and every low level hardware component of the facility such as sensors and actuators, the control layer is built on top of the already existing Building Energy Management System (BEMS). This strategy greatly reduces the deployment time and costs of these control systems making it an appealing choice for real-world problems.
The student will create a statistical model of the thermal dynamics of Pôlydome and regulate its energy consumption without causing discomfort to individuals. Gaussian Processes (GPs) and Model Predictive Control (MPC) are to be employed to accomplish the task.
Requirements: Model Predictive Control, basic Machine Learning understanding, enthusiasm! Good python skills is a plus.
Professor: Colin Jones
Type of project: Semester or Master
Contact: Emilio Maddalena, Yingzhao Lian
J065——————————————————————————-
 Design and Control of Rigid-Wing Airborne Wind Energy Kites
Design and Control of Rigid-Wing Airborne Wind Energy Kites
Wind resources tend to be significantly stronger and more consistent with increasing altitude. Furthermore, conventional wind turbines quickly reach their limit in accessing these higher winds due to structural limitations. This creates a potential for improved power generation with Airborne Wind Energy systems. A frequent design for such systems includes a flying airfoil tethered to a ground station. The station is equipped with a power generator and the aerodynamic force generated by the flying wing is used to drive this generator as the tether reels out under the aerodynamic force. Once the tether reaches its maximum length the wing enters a low force generating gliding trajectory and the tether is reeled back in with low power consumption, thus generating a net positive power generation cycle.
The execution of such motion, however, requires overcoming critical control challenges in presence of system and environmental (wind) uncertainties. The proposed project will provide opportunities for students to work on different aspects of the system and has several sub projects as listed below:
- Small-scale (indoor) prototype: Validation of the novel control and estimation techniques on outdoors requires particular wind conditions, coordination with local authorities and often due to possible prototype failure. Many of these problems can be circumvented by flying a scaled version indoors. The current indoor prototype has a number of limitations such as onboard processing power and communications bandwidth. The goal of this project is to choose an appropriate computation platform (subject to strict weight and size constraints) and a communication chip (device). Design and 3D print a mount for the hardware and perform a manual/[or autonomous] flight test.
- Outdoor prototype: The outdoor prototype comprises the ground station [developed] and a flying vehicle. The ground station is an autonomously operating system that should be able to measure spherical coordinates of a kite and tether force, send control signals and receive/log sensor and telemetry data from a kite. The goal of this project is to build a kite based on a commercial foam glider (e.g. EasyGlider 4), choose and mount an appropriate onboard computer and a communication device, as well as necessary avionics and perform a piloted/[or if time allows autonomous] flight.
Requirements: Experience with CAD systems, Embedded Programming [C/C++ or Embedded Python]. Knowledge of flight mechanics and ROS is a plus.
Professor : Colin Jones
Type of project: Semester / Master
Contact: Petr Listov
J062——————————————————————————-

Modeling and Control of the Smart Building: an Application in the Modern MED building
The unpredictable pattern of distributed carbon-free renewable generation poses challenges to the modern power system. Meanwhile, commercial buildings, which represents over 40% of EU energy consumption, reveal their potential in resolving this challenge. On one side, a properly controlled building can adjust flexible energy consumption to meet the variable generation, which is called demand response (DR). On the other hand, modeling and controlling the building could significantly lower the total energy consumption.
On EPFLcampus, a modern mechanical engineering building (MED) equipped with informative sensors and high performance actuators has come into service since 2016. Its four-layer, multi-zone and multi-use structure replicates most the commercial building control schemes in practice, which enables us to investigate various research and application possibilities. The proposed project motivates students to investigate different aspect of building control as follows:
- Data driven modeling of the MED building with data collected over the last few years. Any possible solutions from machine learning community is welcomed.
- Develop first-principle model-based simulator in MATLAB: integrate EnergyPlus, OpenBuiltinto a comprehensive simulator.
- Implement model-based controller, in particular MPCin single-zone/multi-zone scenarios.
Requirements:MPCknowledge, clean and tidy coding habits and passion!
Professor:Colin Jones
Type of project: Semester or Master
Contact: Emilio Maddalena, YingzhaoLian
J063——————————————————————————-

Demand Response Incentive MPCfor Power Systems in Pakistan
The constant rise in electricity demand in emerging nations leads to frequent load shedding and blackouts, causing unexpected inconvenience to their citizens. Since last year, Pakistan has achieved an average generation vs. demand balance, but still faces network instability due to the insufficient tolerance to demand peaks. Besides the long-term projects in upgrading the transmission system, demand response turns out to be a proper plan for alleviating or even resolving this instability. More specifically, controllable loads modify their electricity consumption pattern to meet the performance of grid, thus clipping the load peaks. Demand response has recently been a hot topic in power systems over the last decades because of the emerging distributed generation. This project aims at exploiting its potential beyond the modern power systems, we hereby conclude the all the intriguing aspects as follows:
- Understand/ investigate Pakistan’s power system and explore possible application scenarios of demand response. Compare it with the modern power system, in particular Swiss grid.
- System identification or parameter estimation of the network models.
- Demand response incentive MPC, specifically with a controllable shopping mall, allowing for the networks limits and the customers’ comfort level, etc. This direction relates more to quasi real-time dynamics optimization problem.
- Scheduling the power consumption sequence, allocating corresponding demand respond task accordingly. This direction relates more to large scale slow dynamics optimization problem.
- Static planning of the power system infrastructure, such as battery allocation and PV installation. This direction relates more to static optimization problems.
The specific problem to be tackled will be decided according to the background of the student and his/her interests. This project gives students chances to have better understanding of both modern and developing grids, and it is also a rare chance to touch real-world data as well as a real-world large problem.
Requirements:basic knowledge of power systems, MPC, system identification, good coding habit.
Professor:Colin Jones
Type of project: Semester or Master
Contact: Emilio Maddalena, YingzhaoLian
J048——————————————————————————-

Artificial intelligence algorithms for efficient control of buildings and ![]() grids
grids
The energy systems group at CSEMis developing innovative technologies at the intersection of power and energy, control, and data science. In the march towards a fully- decarbonised energy system, we are developing control solutions to make buildings and grids more energy-efficient and more flexible. The current state of the art is model- predictive control to optimize the operating conditions of distributed energy resources. However its practical deployment is hindered by the time and effort required to build models of these resources, and by the inability of most models to reflect the impact of occupants on the energy performance of buildings.
In this context, we are offering an internship on the development of artificial-intelligence algorithms. The objective of the project is to build on state-of-the-art algorithms in deep reinforcement learning to create robust and optimal control strategies. Such algorithms include deep Q-networks (DQN, first demonstrated by Deepmindin 2013 to play Atari games), deep deterministic policy gradient (DDPG, first introduced by Google Deepmindin 2015 for simple motion control tasks), and proximal policy approximation (PPO, introduced by Open AI in 2017 for humanoid running and steering).
The physical nature of the control problems in energy management raises some specific challenges for these algorithms, especially in terms of convergence. The project will therefore combine theoretical aspects, with an opportunity to improve some of the most advanced general-purpose artificial intelligence algorithms, and practical aspects involving the rapid prototyping of software architectures and the implementation of algorithms.
While the objective of the work is clearly industrial, its nature means there will be scope to present the results in scientific journals or at conferences. The student will be part of a team of twelve experienced engineers and researchers.
Professor:Colin Jones
Type of Project: Master in Industry
Contacts: Pierre-Jean Alet, Baptiste Schubnel
F001——————————————————————————–
 Development of a software library for microgrid simulation
Development of a software library for microgrid simulation
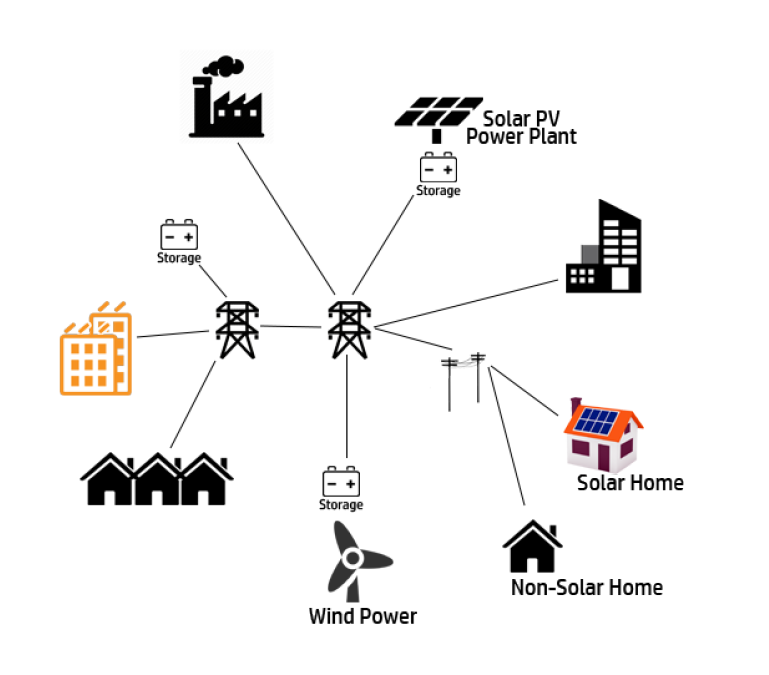
In the past decades, there has been a paradigm shift in the operation of power systems with an increased focus on localized and distributed generation as opposed to centralised mechanisms. Microgrids (mGs), both AC and DC, are spatially distributed systems composed of multiple small subsystems, for example, fexible loads, distributed small-scale generation, storage units etc., interconnected to each other through an electrical network. The manifold advantages of mGs like enhanced power quality, reduced transmission losses, capability to operate in grid-connected and islanded modes, and compatibility with renewable distributed generation, make them a promising operational architecture for future power systems. Moreover, recent series of legislation, strongly favouring the concept of sustainable and renewable energy, has reinvigorated interest in stable operation and control of mGs.
In order to study mGs and successively apply efficient control algorithms, a modelling framework is of paramount importance. The goal of this project is to ease simulation and enable fast prototyping of AC and DC mGs. Some basic components are present in simulation environments for electrical systems such as PSCAD, which not only allow one to build custom libraries of blocks for facilitating the modeling of specific electric systems, but also present a graphical user interface. However, these are general-purpose software packages, and building realistic models of large mGs can be time consuming. In this project, we will develop libraries collecting models of DGUs that are commonly found in AC and DC mGs. PSCAD is chosen as the software environment for mG simulation. Theblocks for controllers that will be developed as part of this project will be coded from scratch, and will eventually be made available publicly.
Requirements: No specific prior requirements. Familiarity with PSCAD, and mGs is a plus.
Professor: Giancarlo Ferrari Trecate
Type of project: Semester or Master
Contact: Pulkit Nahata
F002——————————————————————————–
 Supervisory control of microgrids
Supervisory control of microgrids
Microgrids (mGs) are low voltage energy networks comprising small DGUs and loads. Their development has been motivated by several reasons. First, they foster the use of renewable resources, in line with decarbonization targets set by several countries. Second, they bring generation close to loads hence avoiding transmission of electric power over long distances. Third, redundancy in generation can increase the robustness of the electric system. At the same time it can significantly improve power quality. On the economical side, mGs are seen as the key component of agile power systems making them one of the most promising emerging technologies. Moreover, mGs allow two-way flow of power and are expected to contribute to the deregulation of the energy market by allowing the active participation of consumers and owners of small generation units.
Despite their manifold advantages, mGs present several stability- and performance-related issues. At local level, mG technology should allow DGUs and loads to join and leave a mG, and simultaneously ensure system stability with minimal supervision efforts. Similarly, at a higher level, multiple mGs should be able to join and split seamlessly, so that flexible coalitions can be realised. Certain goals can be achieved in a distributed or decentralised fashion, however, a few require centralised supervisory control. Examples are faults in the loads, which can propagate and destabilize the system, and cyberattacks, which target the control communication network for tampering with the mG dynamics. Therefore, local controllers need to be complemented with algorithms for detecting malfunctions in the system and possibly trigger remedial actions such as control reconfiguration. The aim of this project is realise a modular supervisory control architecture initially in a centralised fashion and later explore the feasibility of a distributed/decentralised architecture. The project is expected to have a theoretical flavour including analytical proofs followed by validation through necessary simulations.
Requirements: Basic course in control theory, linear algebra, and sufficient mathematical maturity. Familiarity with Matlab/Simulink, PSCAD, and mGs is a plus.
Professor: Giancarlo Ferrari Trecate
Type of project: Semester or Master
Contact: Pulkit Nahata
J046——————————————————————————-
 Modeling and control of airborne wind energy systems
Modeling and control of airborne wind energy systems
Wind resources tend to be significantly stronger and more consistent with increasing altitude. Furthermore conventional wind turbines quickly reach their limit in accessing these higher winds due to structural limitations. This creates a potential for improved power generation with Airborne Wind Energy systems. A frequent design for such systems includes a flying airfoil tethered to a ground station. The station is equipped with a power generator and the aerodynamic force generated by the flying wing is used to drive this generator as the tether reels out under the aerodynamic force. Once the tether reaches its maximum length the wing enters a low force generating gliding trajectory and the tether is reeled back in with low power consumption, thus generating a net positive power generation cycle.
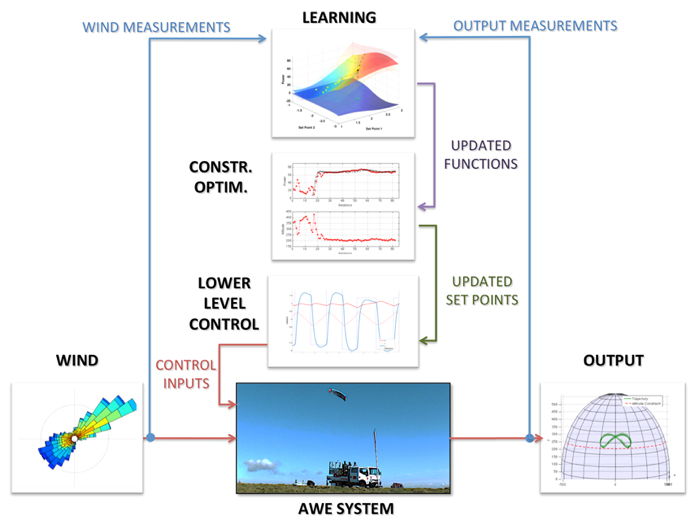
The execution of such motion however requires overcoming critical control challenges and perform control and optimization for improved power generation in presence of system and environmental (wind) uncertainties. The proposed project will provide opportunities to students to work on different aspects of the system and has several subprojects as listed below:
- System modeling and nonlinear control:Will explore methods for modeling the system for better control and will explore the tools of robust and adaptive nonlinear control theory to implement controllers for the existing experimental platforms.
- Path following model predictive control: Will implement and test model predictive control (MPC) schemes for tracking of power optimal trajectories in the experimental system.
- Data based modeling and control of experimental systems: We will explore the use of Gaussian Process Machine Learning tools to model the dynamics and performance characteristics of the system to find the optimal control inputs for the system. The learning based models further provide an improved prediction performance crucial for the model based control methods explored above.
- Design of the Ground Control Unit: we will improve mechanical and electrical design of the existing small scale ground station prototype. The ground station is an autonomously operating system that should be able to measure spherical coordinates of a kite and tether force, send control signals and receive/log sensor and telemetry data from kite.
Requirements: Experience with CAD systems, Embedded Programming ( C/C++ or Embedded Python), knowledge of ROS is a plus.
Realistic high fidelity simulators and working experimental platforms are ready and will be available to bench test the controllers and learning algorithms on the real system.
Professor: Colin Jones
Type of project: Semester or Master
Contact: Sanket Diwale, Petr Listov