K049——————————————————————————–
 System identification of material dispensing
System identification of material dispensing
A swiss company active in the field of 3D printing and converging digital manufacturing dedicates its efforts to offer high-end 3D printing instruments and solutions.
Extrusion is a typical process used in 3D printing applications. By this process the material is pushed with a controlled force through a nozzle in order to form a fibre with constant section. Many suitable materials are however characterized by a highly non-Newtonian behaviour. Therefore, the process contains non-linearity that can be compensated or linearized near interested regions. Based on measurements and theoretical concepts, the goal of this project is to develop a method to identify a dynamic model of the dispensing process. Different approaches combining classical methods of linear system theory can be applied.
The proposed project gives the opportunity to realize concrete applications in the very interesting and breakthrough domain of additive manufacturing.
MER: Alireza Karimi
Type of project: Master in industry
Contact: Alireza Karimi
J048——————————————————————————-
 Artificial intelligence algorithms for efficient control of buildings and grids
Artificial intelligence algorithms for efficient control of buildings and grids
The energy systems group at CSEM is developing innovative technologies at the intersection of power and energy, control, and data science. In the march towards a fully- decarbonised energy system, we are developing control solutions to make buildings and grids more energy-efficient and more flexible. The current state of the art is model- predictive control to optimize the operating conditions of distributed energy resources. However its practical deployment is hindered by the time and effort required to build models of these resources, and by the inability of most models to reflect the impact of occupants on the energy performance of buildings.
In this context, we are offering an internship on the development of artificial-intelligence algorithms. The objective of the project is to build on state-of-the-art algorithms in deep reinforcement learning to create robust and optimal control strategies. Such algorithms include deep Q-networks (DQN, first demonstrated by Deepmind in 2013 to play Atari games), deep deterministic policy gradient (DDPG, first introduced by Google Deepmind in 2015 for simple motion control tasks), and proximal policy approximation (PPO, introduced by Open AI in 2017 for humanoid running and steering).
The physical nature of the control problems in energy management raises some specific challenges for these algorithms, especially in terms of convergence. The project will therefore combine theoretical aspects, with an opportunity to improve some of the most advanced general-purpose artificial intelligence algorithms, and practical aspects involving the rapid prototyping of software architectures and the implementation of algorithms.
While the objective of the work is clearly industrial, its nature means there will be scope to present the results in scientific journals or at conferences. The student will be part of a team of twelve experienced engineers and researchers.
Professor: Colin Jones
Type of Project: Master in Industry
Contacts: Pierre-Jean Alet, Baptiste Schubnel
K053——————————————————————————–
 Automatic control of fibre deposition for micro-patterning in additive manufacturing
Automatic control of fibre deposition for micro-patterning in additive manufacturing
This project is proposed by a swiss company active in the field of 3D printing and converging digital manufacturing dedicating its efforts to offer high-end 3D printing instruments and solutions.
Combining classical 3D printing technologies (i.e. extrusion of a large variety of materials) with emerging advanced fabrication approaches enables new ways of tuning construct properties. Among others these can be mechanical strength and anisotropy or construct functionality, such as electrical conductivity, chemical bonding and even biological functions.
One advanced fabrication approach is the production of micro fibres using electro hydrodynamic dispensing. This technology allows the production of micro-fibres on the scale of several microns diameter with an approximately constant extrusion speed.
The goal of this project is to optimize the print-head (robot) control in order to increase the fibre deposition quality. Different approaches can be envisaged combining linear system identification with iterative learning control methods. The key topics are: understanding the relationship of fibre production and robot dynamics, choice of appropriate control methodology and proof-of-concept, implementation and testing.
MER: Alireza Karimi
Type of project: Master in industry
Contact: Alireza Karimi
K051——————————————————————————–
 Control of guide rail less elevators
Control of guide rail less elevators
Elevators are today guided by steel rails which must be placed in a very precise way in order to guarantee a smooth elevator ride. The installation of these rails is very labor intensive and requires highly skilled workforce. In this master thesis, the vision of a guide rail less elevator shall be investigated.
In a first phase, a concept for a guide rail less elevator shall be worked out. Several actuators including additional motors, counter-masses and dampers shall be placed in the elevator system in order to compensate the horizontal forces which would need to be taken by the guide rails. In a second phase, an associated Simulink model shall be set up in order to verify the concept and to show both limits and chances of the concept of a guide rail less elevator.
This master thesis dos not aim to get an overall concept of a guide rail less elevator considering all possible aspects. We would focus on the question of how modern mechatronic actuator technology and the control thereof can contribute to the vision of a guide rail less elevator.
The master thesis is conducted together with the New Technologies Department of Schindler Elevators Ltd.
MER: Alireza Karimi
Type of project: Master in EPFL plus internship in industry
Contact: Alireza Karimi
 |
This project is carried out in collaboration with the new technologies dept. of Schindler Ltd. |
J050—————————————————————————–
 Optimal planning and control designs for autonomous driving
Optimal planning and control designs for autonomous driving
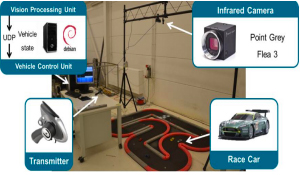
Autonomous driving technologies that aim for more safety, comfort, and environmentally friendly vehicles, have been growing rapidly in automotive industry recently. These systems go beyond vehicle-centric assistant applications by integrating traffic and environment information. One of the main challenges in autonomous driving development is to design and then validate the planning and control algorithms in a closed-loop fashion, where both vehicle dynamics characteristics and a wide variety of traffic scenarios are taken into account. The designs should also guarantee optimal performance toward precise tracking, and time/fuel optimality with respect to both vehicle and traffic constraints (i.e. avoid pedestrians and other cars).
One of the main innovation objectives of Siemens PLM is to accelerate the research and development activities of ADAS (advanced driver assistance systems) and autonomous driving technologies. We are continuously looking for outstanding students who are eager to do their Master thesis or internship on a challenging research project in a highly dynamic and international research environment. We have a variety of possible projects available that cover different aspects of planning and control algorithms, ranging from very theoretical to practical. The company also provides various tools to support the research activities, for example, Imagine.Lab Amesim for vehicle dynamics modelling, PreScan for sensor (camera, lidar, radar,…) and traffic environment modelling, and a miniature race car setup for embedded control implementation.
Examples of possible (but not limited to) topics: optimal control and learning control for an ADAS application (i.e. roundabout crossing, valet parking), fast embedded optimal control algorithm, optimal path/motion planning, simultaneous localization and mapping (SLAM) in virtual environment, vehicle dynamics, traffic planning and verification…
Background: control systems, robotics, computer science, or mathematics, familiar with programming. Experience with optimization, vehicle dynamics, ROS or autonomous vehicles is a plus.
Professor: Colin Jones
Type of project: Master
Contact: Colin Jones or Dr. Son Tong
| The work will be performed in collaboration with Siemens PLM Software in Leuven, Belgium. |
K040——————————————————————————–
 Control of a reaction sphere actuator for satellite attitude control
Control of a reaction sphere actuator for satellite attitude control
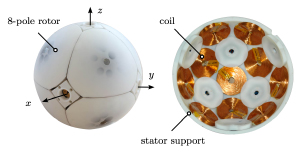
A Reaction Sphere (RS) has been proposed as a potential alternative to traditional Attitude and Orbit Control System (AOCS) actuators based on reaction wheels. The RS consists of an 8-pole permanent magnet spherical rotor that is magnetically levitated and can be accelerated about any axis by a 20-pole stator with electromagnets. A schematic of the RS actuator is depicted in Fig. 1. A RS laboratory prototype has been manufactured to validate force and torque models. More recently, a spherical rotor optimized to improve its manufacturability has been developed.
Classical dynamic controllers have been developed to levitate the rotor inside the stator (magnetic bear- ing) and to control the rotor angular velocity. Preliminary closed-loop measurements using the developed prototype have been performed showing the ability of simultaneously levitating the rotor while rotating it about a given arbitrary axis. During rotation, the performance of the bearing deteriorates due to rotor-orientation- dependent force and torque errors, rotor non-sphericity and mechanical/magnetic unbalance, test bench alignment problems, and deformations of the stator due to rotor weight. To address these issues, a novel pro- totype of reaction sphere with reduced distortion of the rotor magnetic flux density and improved mechanical properties has recently been developed.
The proposed project aims at investigating new techniques for magnetic bearing and angular velocity control. Furthermore, notch-filtering techniques could be studied as a countermeasure to minimize vibrations during rotation. The proposed activities include a literature review of existing techniques, the development of control algorithms, the implementation and evaluation of the developed algorithms in MATLAB/Simulink, and the implementation of the algorithms on the dSPACE real-time control platform for experimental validation using the RS prototype.
MER: Alireza Karimi
Type of project: Internship with Master in industry
Contact: Alireza Karimi
 |
This project is carried out in collaboration with CSEM in Neuchatel. |